About Me
I work in Apple's robotics team, led by Matthias Müller within Vladlen Koltun's research organization. My vision is to bring intelligent robots into our daily lives.
Previously, I earned my PhD at MIT AeroAstro, where I was advised by Prof. Chuchu Fan in the REALM Lab. Before that, I was an AI Resident at IBM Research. I received an M.S. in ECE from UCSD, where I worked with Prof. Nikolay Atanasov (ERL) and Prof. Dinesh Bharadia (WCSNG), and a B.S. in Automation from Tsinghua University, where I worked with Prof. Li Li.
Email: mengyuethu@gmail.com


Research
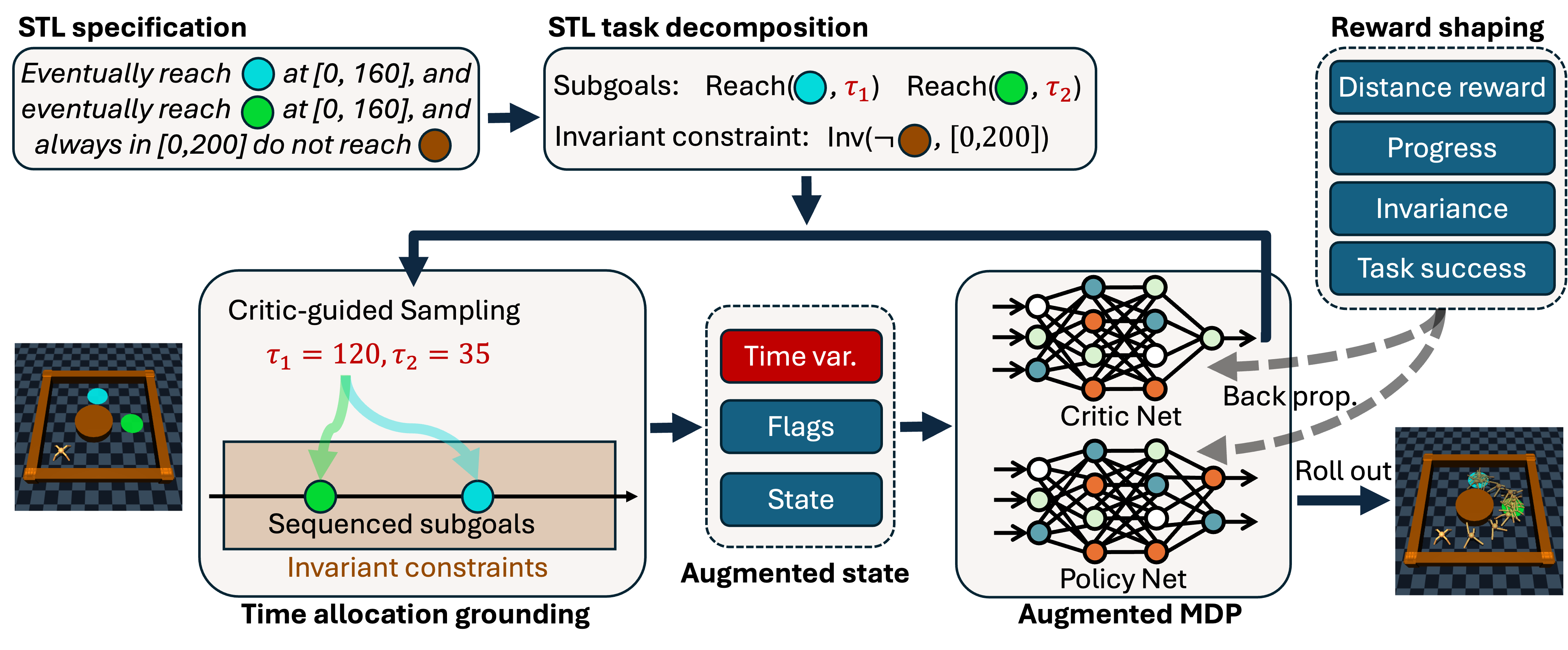
TGPO: Temporal Grounded Policy Optimization for Signal Temporal Logic Tasks
Under review
This paper introduces TGPO, a hierarchical framework that decomposes STL tasks into timed subgoals and invariant constraints. A high-level component proposes time allocations for these subgoals, while a low-level, time-conditioned policy learns to achieve them using a dense, stage-wise reward. During training, TGPO leverages a learned critic to guide the temporal search, focusing on feasible solutions, and experiments show it outperforms baselines with an average 31.6% improvement in task success rate.
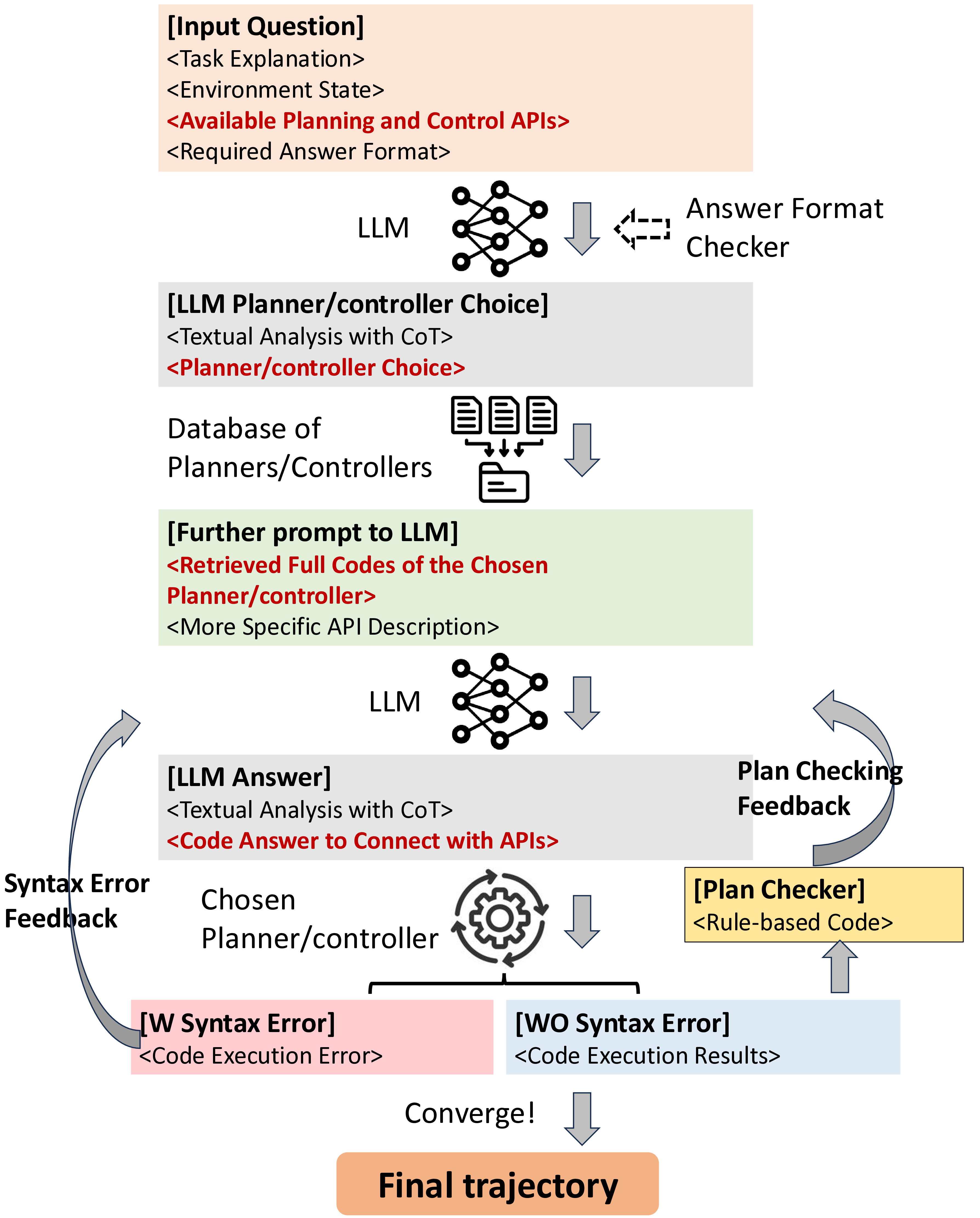
AuDeRe: Automated Strategy Decision and Realization in Robot Planning and Control via LLMs
American Control Conference (ACC), 2026
We propose a framework that leverages LLMs to select appropriate planning and control strategies based on task descriptions, environmental constraints, and system dynamics. These strategies are then executed by calling the available comprehensive planning and control APIs. The results demonstrate that using LLMs to determine planning and control strategies from natural language descriptions significantly enhances robotic autonomy while reducing the need for extensive manual tuning and expert knowledge.
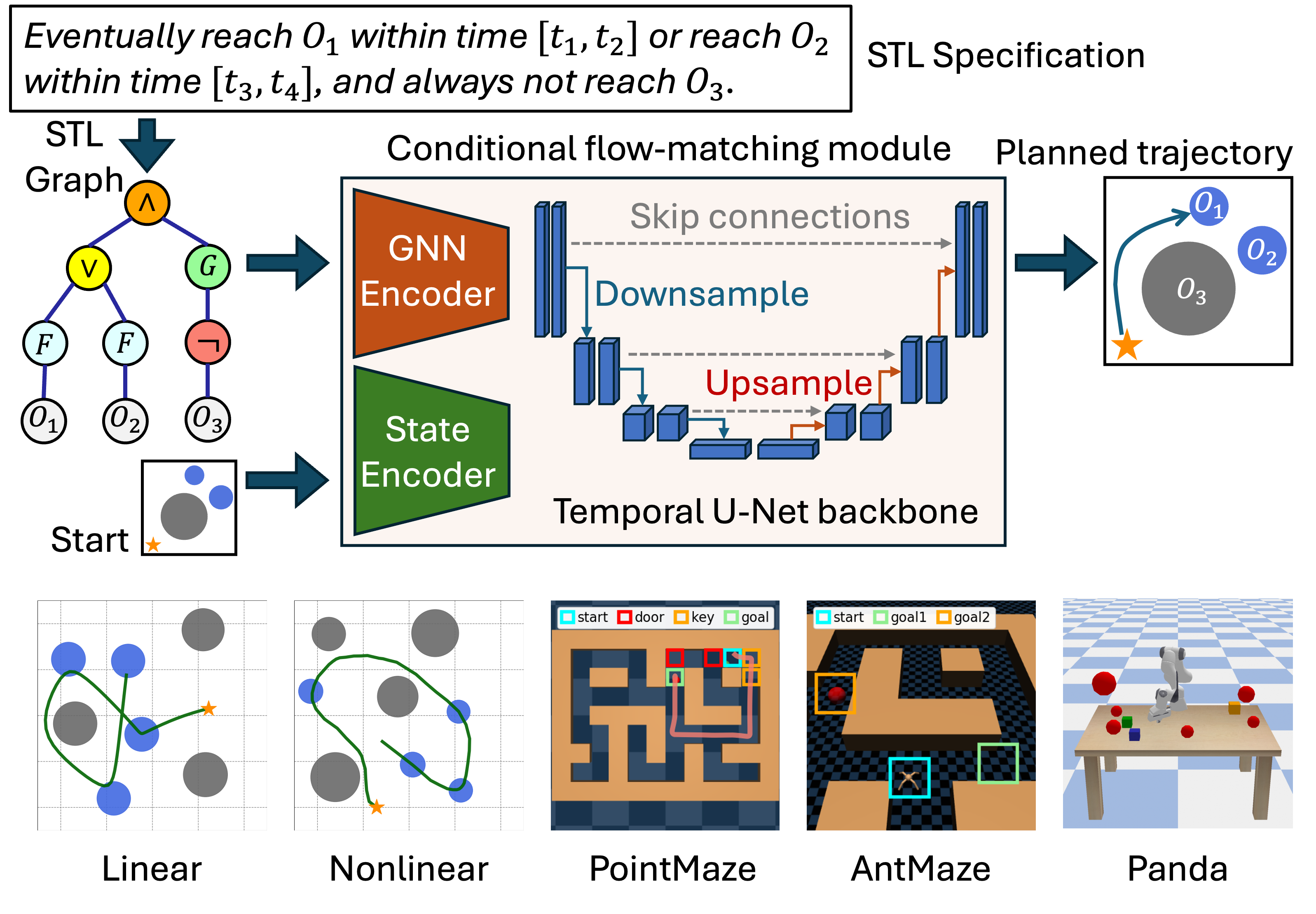
TeLoGraF: Temporal Logic Planning via Graph-encoded Flow Matching
Int. Conf. on Machine Learning (ICML), 2025
We design a learning-based framework that uses Graph Neural Networks (GNN) and flow matching to solve general Signal Temporal Logic (STL) tasks. We collect a large-scale dataset of 200K STL specifications paired with demonstrations and then train our model. We conduct extensive experiments in five simulation environments ranging from simple dynamical models in the 2D space to high-dimensional 7DoF Franka Panda robot arm and Ant quadruped navigation. Results show that our method outperforms other baselines in the STL satisfaction rate. Compared to classical STL planning algorithms, our approach is 10-100X faster in inference and can work on any system dynamics.
Reliable and Efficient Multi-Agent Coordination via Graph Neural Network Variational Autoencoders
IEEE Int. Conf. on Robotics and Automation (ICRA), 2025
We design Graph Neural Network Variational Autoencoders (GNN-VAE) to generate global schedules that efficiently coordinate multi-robot movements. We collect ground truth schedules through a Mixed-Integer Linear Program (MILP) solver and train GNN to encode these solutions in a latent space. Solutions are then decoded following the dual-branch framework. By construction, our GNN-VAE returns solutions that always respect the constraints. Our approach trained on small-scale problems can achieve high-quality solutions even for large-scale problems with 250 robots, being much faster than other baselines.
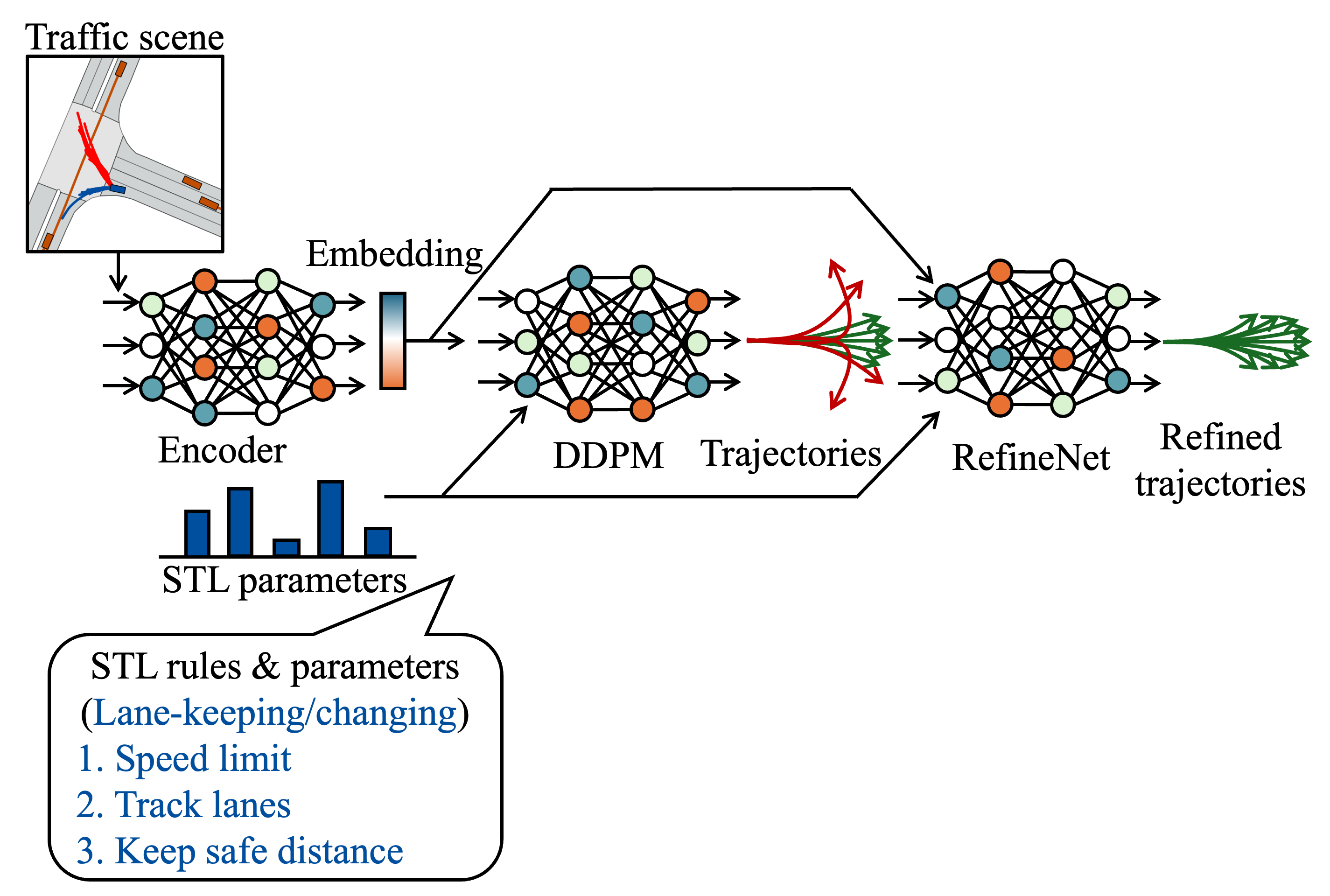
Diverse Controllable Diffusion Policy with Signal Temporal Logic
IEEE Robotics and Automation Letters (RA-L), 2024
We leverage Signal Temporal Logic (STL) and Diffusion Models to learn controllable, diverse, and rule-aware policy. We first calibrate the STL on the real-world data, then generate diverse synthetic data using trajectory optimization, and finally learn the rectified diffusion policy on the augmented dataset. We test on the NuScenes dataset and our approach can achieve the most diverse rule-compliant trajectories compared to other baselines, with a runtime 1/17X to the secondbest approach. In the closed-loop testing, our approach reaches the highest diversity, rule satisfaction rate, and the least collision rate.
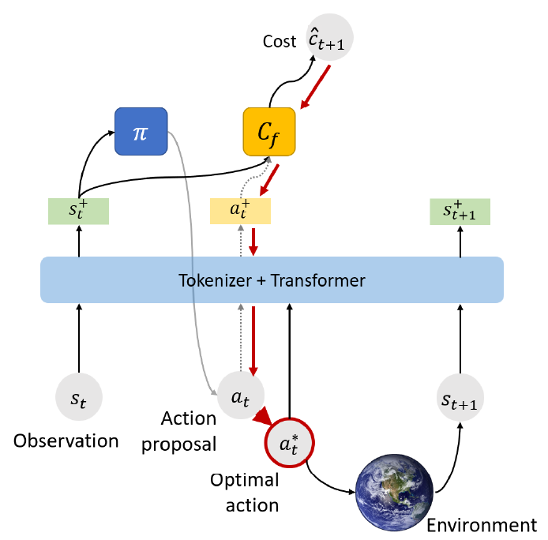
ConBaT: Control Barrier Transformer for Safe Policy Learning
IEEE Int. Conf. on Robotics and Automation (ICRA), 2024
We propose Control Barrier Transformer (ConBaT), an approach to learn safe behaviors from demonstrations. ConBaT is inspired by control barrier functions and uses a causal transformer to predict safe actions with a critic that requires minimal labeling. During deployment, we employ a lightweight optimization to ensure future states lie within the learned safe set. We apply our approach to control tasks and show that ConBaT results in safer policies compared to classical and learning-based baselines such as imitation learning, reinforcement learning, and model predictive control.
Signal Temporal Logic Neural Predictive Control
IEEE Robotics and Automation Letters (RA-L), 2023
We learn a neural network controller to satisfy the requirements specified in Signal Temporal Logic (STL). Our controller learns to maximize the STL robustness score in training. In testing, our controller predicts within a planning horizon to satisfy STL. A backup policy is designed to ensure safety when our controller fails. On six tasks we outperform classical methods (MPC, STL-solver), model-free and model-based RL methods in STL satisfaction rate, especially on tasks with complex STL, while being 10X-100X faster than the classical methods.
Hybrid Systems Neural Control with Region-of-Attraction Planner
5th Annual Learning for Dynamics & Control Conference (L4DC), 2023
In this work, we propose a neural network (NN)-based method to control hybrid systems. Upon mode switching, we propose a differentiable planner to ensure the states after switching can land in next mode's RoA, hence stabilizing the hybrid system. With low running time, our controller achieves a higher stability/success rate over MPC, RL, common Lyapunov methods (CLF), linear quadratic regulator (LQR), quadratic programming (QP) and Hamilton-Jacobian-based methods (HJB).
Density Planner: Minimizing Collision Risk in Motion Planning with Dynamic Obstacles using Density-based Reachability
IEEE Int. Conf. on Robotics and Automation (ICRA), 2023
We propose a density-based method which uses a neural network and the Liouville equation to learn the density evolution for a system with an uncertain initial state. We conduct motion planning experiments on simulated environments and environments generated from real-world data and outperform baseline methods such as model predictive control and nonlinear programming. While our method requires offline planning, the online run speed is 100times faster compared to model predictive control.
Density of Reachable States and How to Use it for Safe Autonomous Motion Planning
NASA Formal Methods Symposium (NFM), 2022
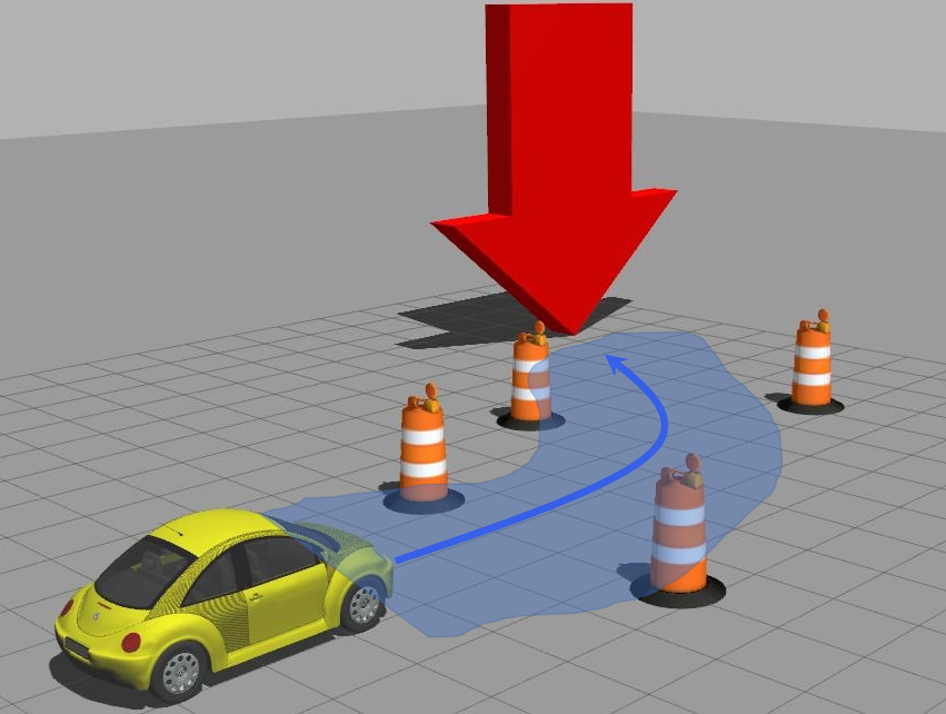
Recent work provides a data-driven approach to compute the density distribution of autonomous systems’ forward reachable states online. In this paper, we study the use of such approach in combination with model predictive control for verifiable safe path planning under uncertainties. We design two challenging scenarios (autonomous driving and hovercraft control) for safe motion planning in environments with obstacles under system uncertainties. By leveraging the estimated risk, our algorithm achieves the highest success rate in goal reaching when enforcing the safety rate above 0.99.
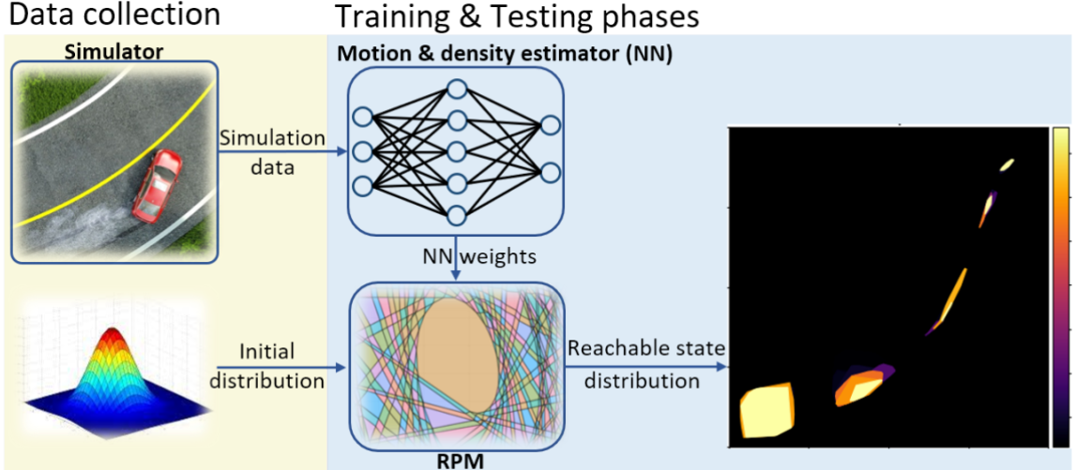
Learning Density Distribution of Reachable States for Autonomous Systems
Conference of Robotics and Learning (CoRL), 2021
In this work, we propose a data-driven method to compute the density distribution of reachable states for nonlinear systems. Our approach learns system dynamics and the state density jointly from trajectory data, guided by the fact that the state density evolution follows the Liouville partial differential equation. We show that our learned solution can produce a much more accurate estimate on density distribution, and can quantify risks less conservatively and flexibly compared with worst-case analysis.
Reactive and Safe Road User Simulations using Neural Barrier Certificates
IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2021
We proposed a reactive agent model which can ensure safety by learning high-level decisions from expert data and a low level decentralized controller guided by the jointly learned decentralized barrier certificates. Empirical results show that our approach can achieve a significant improvement in safety while being similar to human behaviors.
AdaFuse: Adaptive Temporal Fusion Network for Efficient Action Recognition
Int. Conf. on Learning Representations (ICLR), 2021
This paper introduces an adaptive temporal fusion, AdaFuse, that dynamically fuses channels for strong temporal modelling. Extensive experiments on SomethingV1\&V2, Jester and Mini-Kinetics show AdaFuse achieves 40\% computation savings with comparable accuracy to state-of-the-art methods.
AR-Net: Adaptive Frame Resolution for Efficient Action Recognition
European Conf. on Computer Vision (ECCV), 2020
This paper proposes a novel approach, AR-Net (Adaptive Resolution Network), that selects on-the-fly the optimal resolution for each frame conditioned on the input for efficient action recognition in long untrimmed videos. Extensive experiments on several action recognition datasets well demonstrate the efficacy of our method over state-of-the-art.
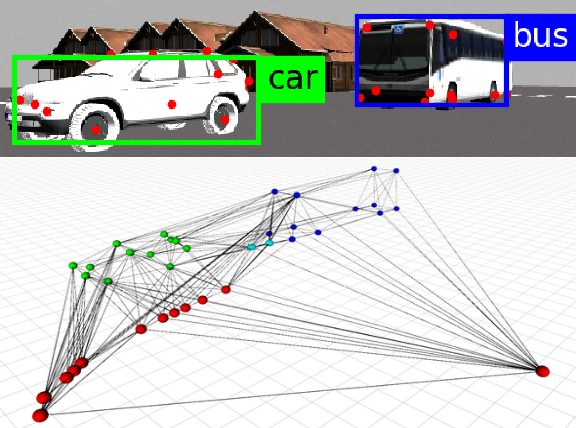
Learning 3D-aware Egocentric Spatial-Temporal Interaction via Graph Convolutional Networks
IEEE Int. Conf. on Robotics and Automation (ICRA), 2020
This paper proposes a 3D-aware egocentric spatial-temporalinteraction framework for automated driving applications. Graph convolution networks (GCN) is devised for interaction modeling. Extensive experiments are conducted using Honda Research Institute Driving Dataset.
Localization and Mapping using Instance-specific Mesh Models
IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2019
This paper focuses on building semantic maps, containing object poses and shapes, using a monocular camera. Our contribution is an instance-specific mesh model of object shape that can be optimized online based on semantic information extracted from camera images.

SIGNet: Semantic Instance Aided Unsupervised 3D Geometry Perception
IEEE Conf. on Computer Vision and Pattern Recognition (CVPR), 2019
This paper introduces SIGNet, a novel framework that provides robust geometry perception without requiring geometrically informative labels. SIGNet is shown to improve upon the state of art unsupervised learning for geometry perception by 30%.
Dense Spatial Segmentation from Sparse Semantic Information
Workshop at Robotics: Science and Systems (RSS), 2018
This paper develops an environment representation that affords reasoning about the occupancy of space, necessary for safe navigation, and about the identity of objects, necessary for complex task interpretation.
Cooperative Driving Strategies for Nonsignalized Intersections
IEEE Transactions on Vehicular Technology (TVT), 2017
We study the difference between two major strategies of cooperative driving at intersections: the “ad hoc negotiation based” strategy and the "planning based" strategy. We carry out a series of simulations under different traffic scenarios for comparison. Results indicate the performance of a strategy mainly depends on the passing order of vehicles that it finds.
Collection
Labs
- REALM: Reliable Autonomous Systems Lab at MIT
- ERL: Existential Robotics Laboratory
- WCSNG: Wireless Communication Systems and Networking Group
Routine
Procastination
Ph.D.
- 北美博士必读清单
- 大牛写的非技术类作品
- Crafting Your Research Future
- CS Graduate Survival Guide
- Doing research in Computer Vision
Robotics
- Awesome SLAM
- Past, Present and Future of SLAM
- SLAM Front-Ends
- Bundle Adjustment: A Modern Synthesis
- POMDP Tutorial
Technician
Blogs
Miscellaneous
Soccer

High school friends in THU-PKU Derby, 2014

Champion at Tsinghua Futsal Tournament, 2014

Champion at Automation Tournament, 2016

Champion at Chinese Alumni League, 2017

Champion at SV Alumni Soccer Tournament, 2019
Running
High school record, 2012 (3000m race)

Unlimited relay race champion at BUAA, 2014

1500m race champion, Tsinghua Sports Meeting, 2015

4*800m race champion, Tsinghua Sports Meeting, 2015

4*400m race champion, Tsinghua Sports Meeting, 2016